'软触觉逻辑'技术在可伸展材料中分配决策

即时发布
研究人员启发了章鱼,研究人员已经开发了一种感官,计算和响应而没有任何集中处理的结构 - 创建一个不是机器人而不是一台计算机的设备,而是具有两者的特征。新技术可承担在各种应用中使用的承诺,从软机器人到假肢设备。
“We call this ‘soft tactile logic,’ and have developed a series of prototypes demonstrating its ability to make decisions at the material level – where the sensor is receiving input – rather than relying on a centralized, semiconductor-based logic system,” says Michael Dickey, co-corresponding author of a paper on the work and Alcoa Professor of Chemical and Biomolecular Engineering at North Carolina State University.
“我们的方法受到章鱼的启发,具有集中性大脑,而且在整个手臂上也具有显着的神经元结构。这提出了武器可以基于感官输入的武器“做出决定”的可能性,而没有来自大脑的直接指导。“
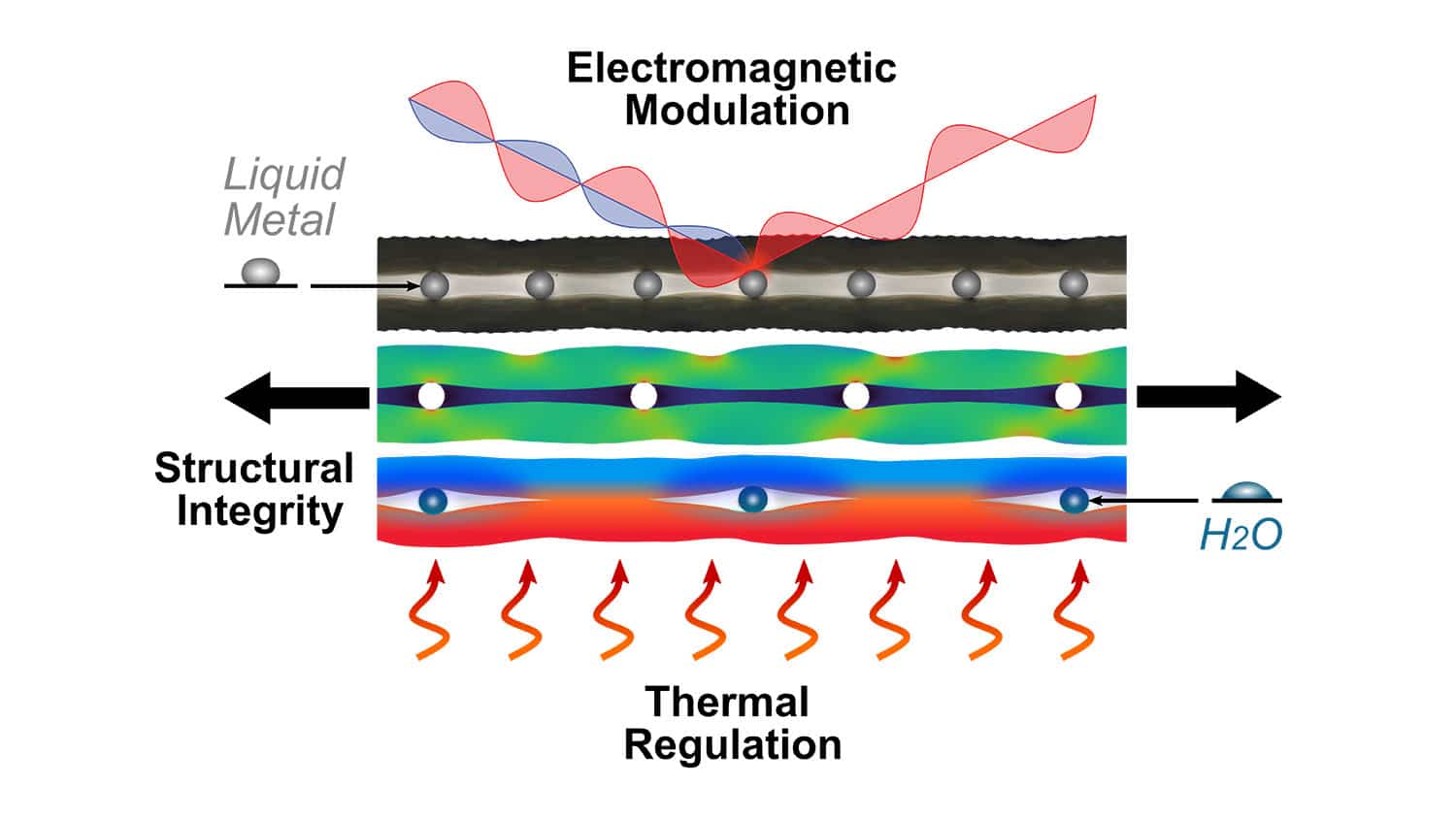
在柔软触觉逻辑原型的核心是一种常见结构:颜料在不同温度下改变颜色,混合成柔软,可伸缩的硅氧烷形式。色素含有的硅氧烷含有填充有金属的通道,其在室温下是液体,有效地产生鳞状的线神经系统。
按压或拉伸硅树脂使液态金属变形,从而增加其电阻,随着电流通过它而提高其温度。较高的温度触发周围温度敏感染料的颜色变化。换句话说,整体结构具有可调谐的传感触摸和应变的装置。技术视频可以在这里看到。
研究人员还开发了软触觉逻辑原型,其中触摸将液态金属变形 - 将电能重新分配到网络的其他部分,导致材料改变颜色,激活电机或打开灯。在一个地方触摸硅胶,产生的响应不同于两个斑点;通过这种方式,系统响应于触摸而执行简单的逻辑。
“这是一个概念证据,证明了一种新的思考方式,我们如何能够如何将决策融入软材料,”Dickey说。
“有生物体可以做出决定而不依赖于僵硬的集中式处理器。模仿这种范式,我们已经使用完全软材料表明了基于材料的分布式逻辑。“
研究人员目前正在探索制造更复杂的软电路的方法,灵感来自生物系统中的复杂传感器和执行器。
本文,“材料触觉逻辑通过接管软质热致致素弹性体,“发表在期刊上自然通信。
本文的第一个作者是杨金,NC州和前博士的前访问学者。江南大学的学生。本文的合作作者是江南大学明桥。本文由伊良林和伊斯山·何斯·鲁拉共同撰写,前博士。学生在NC州;And Abolfazi Kiani是NC国家的访问教授,他也是伊斯法罕大学教师。
- 船员 -
编辑注:研究摘要跟随。
“材料触觉逻辑通过接头的软质热致变色弹性体”
作者:阳金和明桥葛,江南大学;伊梁林,Ishan D.Joshipura和Michael D. Dickey,北卡罗来纳州立大学;北卡罗来纳州立大学和伊斯法罕大学
发表:9月13日,自然通信
迪伊:10.1038 / s41467-019-12161-1
抽象的:常规机器依靠刚性,集中电子元件来做出决定,这限制了复杂性和缩放。在这里,我们表明可以在材料级别实现决策而不依赖于基于半导体的逻辑。受到章鱼臂中存在的分布式决策的启发,我们呈现了一种完全柔软的可伸缩的硅氧烷复合材料,掺杂有热致变色颜料并用液态金属接头。将液态金属耦合的能力变形为焦耳加热的几何变化,从而能够可调谐热机械光学传感的触摸和菌株。在更复杂的电路中,金属的变形可以以将模拟触觉'输入的方式转换为数字比色'输出'的方式重新分配到网络的远端部分。使用材料本身作为决策过程中的活动播放器,提供了创建完全软设备的可能性,该软件在本地响应环境交互或充当反馈循环的嵌入式传感器。