研究人员从自折叠的Kirigami材料制作机器人
即时发布
研究人员已经证明了KiriGami启发的技术如何允许它们设计薄片材料,以响应于环境刺激,自动重新配置为新的二维(2D)形状和三维(3D)结构。研究人员创造了各种机器人设备作为方法的概念证明。
北卡罗莱纳州立大学机械与航空航天工程助理教授尹杰(音)说:“这是我们所知的第一个不需要机械输入的二维kirigami模式自动重塑成不同的三维结构的案例。”尹杰是一篇有关这项工作的论文的通讯作者。“相反,我们以热的形式应用能量,材料会自行重新排列。”
Kirigami是一种艺术形式,其中切割单张纸并折叠以创造新的形状和结构。
新的“主动kirigami”概念依赖于一种三层材料,包括两层对热不敏感的外层和中间一层对热收缩的聚合物层。材料的形状和结构有两种控制方式。贯穿三层的贯穿孔控制着材料的运动范围。蚀刻穿透外层,暴露出热敏聚合物,控制材料折叠的角度和方向,以及折叠的距离。当材料折叠时,它会打开贯穿切口,将薄片的形状转变成2D或3D的设计。
介绍如何看到活跃的Kirigami工作的视频https://www.youtube.com/watch?v=kozsomlokig.。
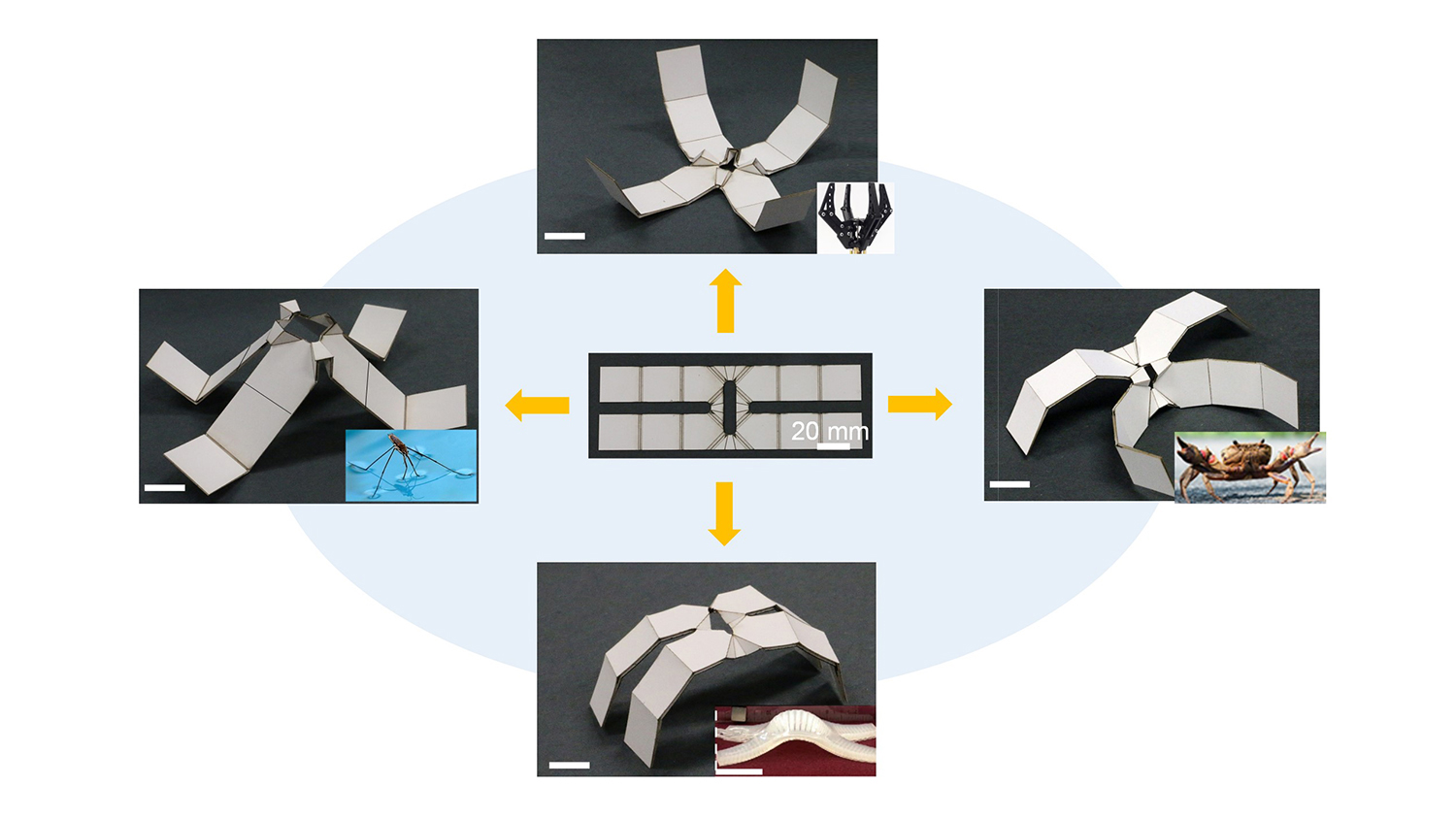
“我们可以制作一个具有相同模式模式的2D模板,并使用它通过在蚀刻略微变化来创造许多不同的3D结构,”尹说。“这有效地使活跃的Kirigami表可编程。”
作为其概念证明的一部分,研究人员使用Kirigami方法来创建一套热敏性Kirigami机器,包括简单的夹持装置和自折叠盒。研究人员还创造了一种柔软的机器人,具有Kirigami身体和气动腿。通过切换身体的方向,研究人员可以迅速重新定位腿部,改变机器人的运动方向。可以看到概念验证机器的视频https://www.youtube.com/watch?v=4u2ara83188&feature=youtu.be.。
“我们使用了这种作品的温度响应性聚合物,但没有理由认为其他刺激反应性聚合物材料如光活性液晶 - 也不会工作,”尹说。“我们很高兴探索这些可编程活性的Kirigami材料的潜在应用范围。”
本文,“可编程主动kirigami元片,具有更自由的驱动,发表在国家科学院的诉讼程序。本文的合作作者是Yichao Tang,最近的博士。寺庙大学毕业,李斌李,博士学位。在NC状态的学生。本文由宾夕法尼亚大学的NC州和蜀阳的Yaoye Hong合作。该工作是以国家科学基金会的支持,根据授权1846651和1727792。
- 船员 -
编辑注:研究摘要跟随。
"可编程主动kirigami元片,具有更自由的驱动"
作者:Yichao Tang,Temple University;玉宾李,玉羊洪和杰寅,北卡罗来纳州立大学;宾夕法尼亚大学舒阳
发表2019年12月16日国家科学院的诉讼程序
迪伊:10.1073 / PNAS.1906435116
抽象的:Kirigami(切割和/或折叠)提供了重新配置超材料的有希望的策略。传统上,Kirigami超材料通常由被动切割单元电池组成,以在机械力下重新配置。在活性Kirigami超材料中的新组成刺激敏感材料,而是能够从剪切单元电池的主动控制产生潜在的新机械性能和功能。然而,传统Kirigami结构中铰链的平面特征显着地限制了切割单元的变形和致动中的自由度(DOF)。为了释放两个约束,在这里,我们展示了实现折叠的通用设计,以重建基于唯一的基于的超材料。我们表明,补充折叠不仅可以通过鞋底切割而丰富的结构重新配置,而且还可以在响应于环境温度使Kirigami Metasheets(3D)致动三维(3D)来实现更多的DOF。利用单位细胞变形的多DOF,我们展示了具有相同切割设计的平面梅拉列章可以用不同的机械性能自折叠成可编程的3D Kirigami Meta结构。最后,我们展示了可编程Kirigami机器和易于转向软机器人的潜在应用。