立即发布
北卡罗莱纳州立大学和天普大学的工程研究人员以水母为灵感,开发了一种软机器人,这种机器人的游动速度比现实生活中的同类机器人还要快。更实际的是,新的水母机器人突出了一项技术,即使用预应力聚合物使软机器人更强大。
“我们之前的工作主要是制作灵感来自猎豹的软机器人北卡罗来纳州立大学(NC State)机械与航空航天工程助理教授尹杰(Jie Yin)表示:“尽管机器人速度非常快,但它们的内部脊柱仍然僵硬。”尹杰是一篇有关这项新工作的论文的通讯作者。“我们想制造一个完全柔软的机器人,没有内部脊柱,仍然利用在两个稳定状态之间切换的概念,以使柔软的机器人移动得更有力,更快。水母是我们的灵感来源之一。”
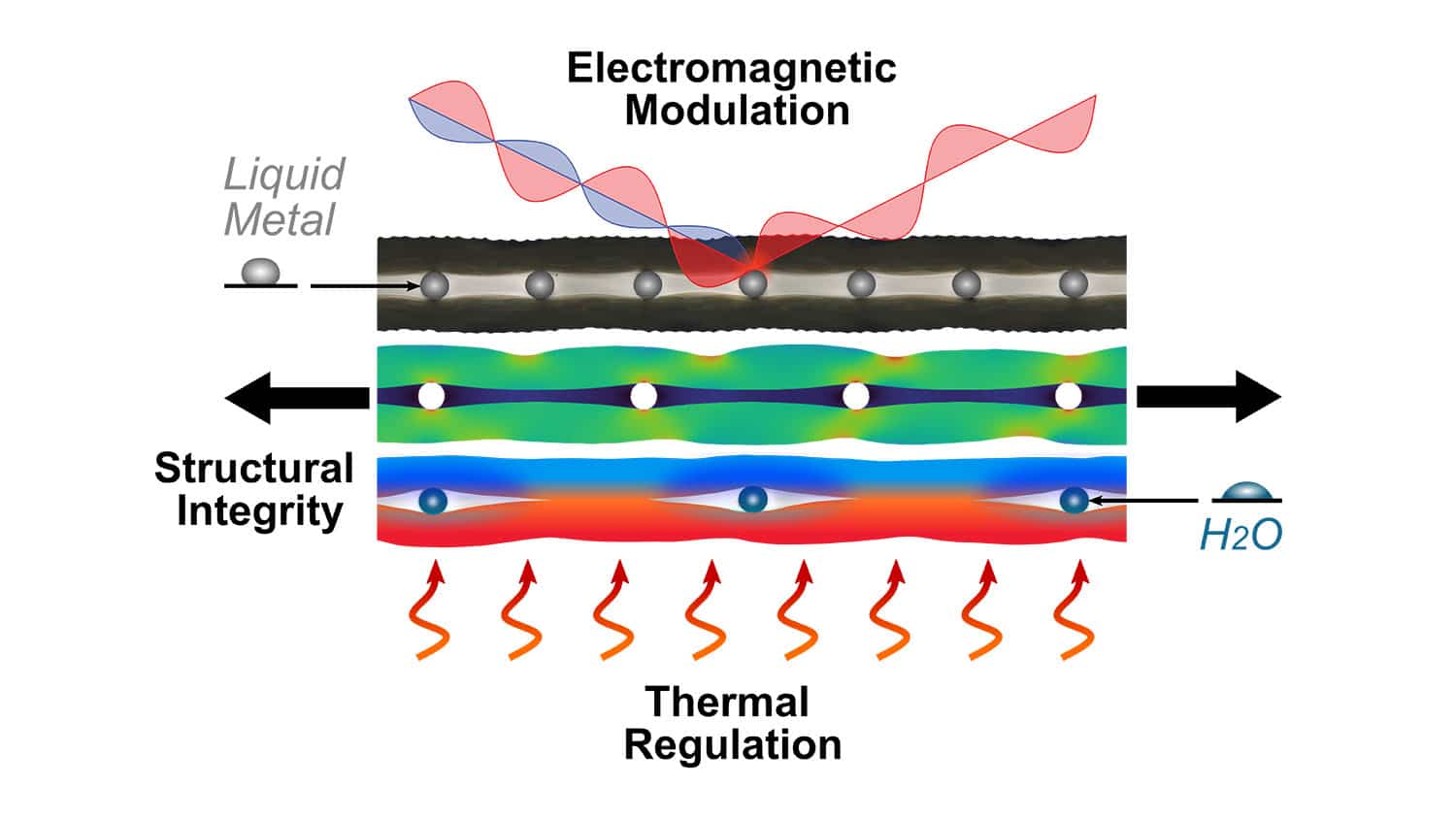
研究人员用两层相同的弹性聚合物粘接而成的新型软机器人。一层聚合物被预应力或拉伸。第二层没有预应力,包含一个空气通道。
尹说:“我们可以通过向通道层泵入空气来让机器人‘弯曲’,我们还可以通过控制预应力层的相对厚度来控制弯曲的方向。”
下面是它的工作原理。当与第三层无应力层(称为中间层)结合时,预应力层想要向特定的方向移动。例如,你可能有一个聚合物条,通过向两个方向拉它来预压。在将预应力材料粘贴到中间层之后,最终的结果将是一个想要向下弯曲的双层条带,就像一个皱眉的脸。如果这个双层带,也称为预应力层,比有空气通道的层更薄,当空气被泵入通道层时,皱眉曲线将弯曲成微笑曲线。然而,如果预应力层比通道层厚,皱褶将变得越来越明显,因为空气被泵入通道层。无论哪种方式,一旦空气被允许离开通道层,材料就会迅速回到原来的“静止”状态。
事实上,这个简单的例子描述了研究小组创造的一种软机器人,一种快速移动的软爬行器。它就像昆虫幼虫卷曲身体,然后向前跳,迅速释放储存的能量。
水母机器人稍微复杂一点,预应力圆盘状的层被拉伸到四个方向(想象它同时被东拉和西拉,然后同时被北拉和南拉)。通道层也是不同的,由环状的空气通道组成。最终的结果是一个看起来像水母的圆顶。
当水母机器人“放松”时,圆顶向上弯曲,就像一个浅碗。当空气被泵入通道层时,穹顶迅速向下弯曲,排出水并推动自身前进。在实验测试中,水母机器人的平均速度为53.3毫米/秒。考虑到研究人员检测的三种水母中,没有一种的速度超过每秒30毫米的平均速度,这还算不错。
最后,研究人员创造了一个带有扭转的三叉抓握机器人。大多数夹持器在“放松”时是张开的,当货物从A点被提起并从A点移动到b点时,夹持器需要能量来抓住货物。但尹和他的合作者使用了预应力层来创造夹持器,其默认位置是紧抓的。打开夹持器需要能量,但一旦到位,夹持器就会回到“静止”模式——紧紧抓住货物。
尹教授说:“这样做的好处是在运输过程中你不需要能量来抓住物体,这样更有效率。”
新的软机器人的视频可以在https://youtu.be/isN1M_gnpWI.
纸”,单稳态和双稳态预弯曲双层驱动器用于高性能多任务软机器人,发表于先进材料技术.这篇论文的第一作者是北卡罗来纳州立大学的博士生池银丁。这篇论文的合著者是尹博士实验室的前博士生唐义超;以及天普大学的刘海军。这项工作得到了国家科学基金2010717和2005374的资助。
希普曼-
编辑:研究摘要如下。
单稳态和双稳态预弯曲双层驱动器用于高性能多任务软机器人
作者: Chi Yinding, Yichao Tang, Jie Yin, North Carolina State University;以及天普大学的刘海军
发表: 6月30日先进材料技术
DOI: 10.1002 / admt.202000370
文摘:软执行器通常设计为固有的无应力和稳定。放松这样的设计约束,可以探索利用机械预应力和弹性不稳定性来实现潜在的高性能软机器人。在这里,利用预应变松弛策略来设计具有可调谐单稳定性和双稳定性的2D和3D预弯曲软执行器,可用于多功能软机器人。通过将内含气动通道的无应力主动层粘结在单轴或双轴预拉伸弹性体条或盘上,分别在预应变释放后生成预弯曲的二维类梁弯曲执行器和三维半球形执行器。这种预弯曲软驱动器通过简单地操纵预应变和偏置双层厚度比,在驱动下表现出可调谐的单稳态和双稳态行为。它们对多功能软机器人的影响在操作和运动方面表现出高性能,包括高效节能的软夹持器通过预应力抓取物体,快速的幼虫式跳跃软爬行器,运动速度为0.65体长/s (51.4 mm/s),快速游动双稳态水母型软机器人,平均速度为53.3 mm/s。