立即发布
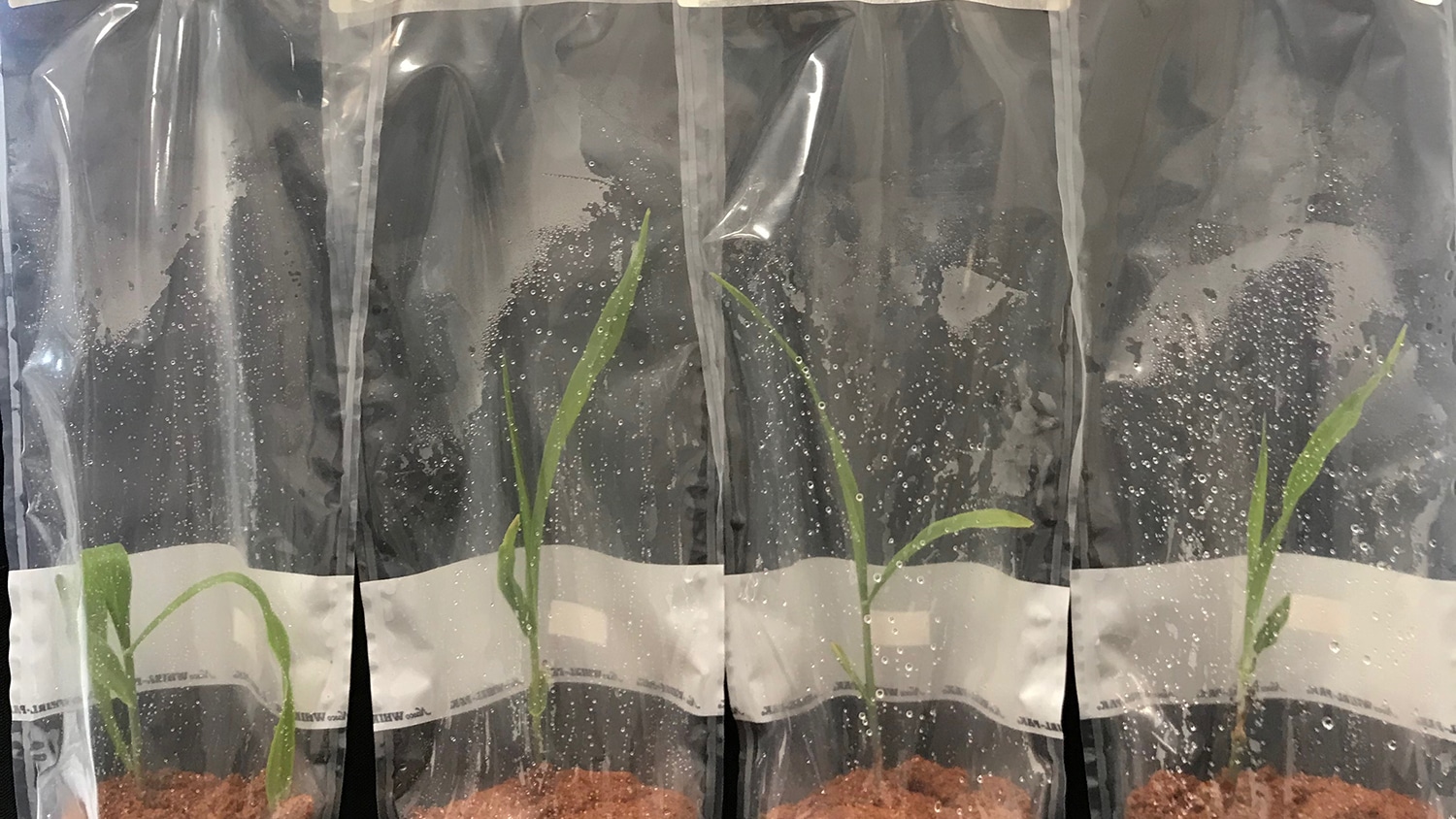
尽管机器人设备广泛应用于从装配线到医药的各个领域,但工程师们很难计算出机器人在抓取物体时产生的摩擦——尤其是在潮湿的环境中。研究人员现在发现了一种解释这种摩擦的新的物理定律,这将推动机器人技术的广泛发展。
北卡罗莱纳州立大学化学与生物分子工程助理教授、一篇相关论文的通讯作者Lilian Hsiao说:“我们在这里的工作为在远程外科手术和制造业等应用领域创造更可靠、功能更强大的触觉和机器人设备打开了大门。”
争论的焦点是所谓的弹性流体动力润滑(EHL)摩擦,即当两个固体表面与它们之间的一层薄流体接触时发生的摩擦。这包括指尖摩擦时产生的摩擦,这种液体是皮肤上自然产生的一层薄薄的油。但它也可以应用于机器人爪抓取涂了一层油的物体,或用于人体内的外科设备。
摩擦力很重要的一个原因是它能帮助我们拿住东西而不掉下来。
萧说:“对人类来说,理解摩擦是一种直觉——即使是在处理肥皂盘子的时候。”“但在开发控制机器人抓取能力的材料时,很难解释EHL摩擦。”
为了开发有助于控制EHL摩擦的材料,工程师需要一个框架,可以统一应用于各种模式、材料和动态操作条件。这正是研究人员所发现的。
萧说:“这个定律可以用来解释EHL摩擦,并且可以应用于许多不同的软系统——只要物体的表面是有图案的。”
在这种情况下,表面图案可以是任何东西,从我们指尖的轻微凸起的表面到机器人工具表面的凹槽。
由萧和她的研究生彭云虎共同开发的新物理原理,利用四个方程来解释在理解EHL摩擦时所起作用的所有物理力。在这篇论文中,研究小组用三个系统证明了这一规律:人类的手指;仿生机器人指尖;还有一种叫做摩擦流变仪的工具,用来测量摩擦力。彭是该论文的第一作者。
“这些结果对于机器人双手非常有用,对于可靠地处理制造过程具有更大细致的控制,”Hsiao说。“它在远程手术领域具有明显的应用,在该境外外科医生远程控制机器人设备以进行外科手术。我们将此视为了解触摸和控制合成系统中的触摸的基本进步。“
纸”,机器人和人类手指在软微图案板上的弹性流体力学摩擦,发表于自然材料.该论文由北卡罗来纳州立大学的博士生克里斯托弗·瑟法斯(Christopher Serfass)共同撰写;北卡罗来纳州立大学的本科生凯瑟琳·希尔(Catherine Hill);加州大学圣巴巴拉分校的Anzu Kawazoe, Yitian Shao和Yon Visell;以及加州大学洛杉矶分校的肯尼斯·古铁雷斯和维罗妮卡·j·桑托斯。
这项工作得到了AAAS Marion Milligan Mason奖和美国国家科学基金会(National Science Foundation)的支持,拨款编号为CBET-2042635。
希普曼-
编辑:研究摘要如下。
“软微型解放基板上机器人和人手指的弹性动力学摩擦”
作者: Yunhu Peng, Christopher M. Serfass, Catherine N. Hill and Lilian C. Hsiao, North Carolina State University;Anzu Kawazoe, Yitian Shao, Yon Visell,加州大学圣巴巴拉分校;加州大学洛杉矶分校(University of California-Los Angeles)的肯尼斯·古铁雷斯(Kenneth Gutierrez)和维罗妮卡·j·桑托斯(Veronica J. Santos)说
发表: 4月29日,自然材料
DOI: 10.1038 / s41563 - 021 - 00990 - 9
文摘:纹理表面之间的摩擦滑动从图案化的聚合物到我们自己的皮肤,对于工程来说是对工程的基本和实际的重要性。人类的触感是一种精致的敏感手段,我们在我们探索或掌握物体时迅速和无意识地测量表面的摩擦性质。新兴研究旨在赋予具有类似能力的机器人手,但这种目标仍然远未实现。尽管有触感的触感,但是指尖与图案化软表面之间的滑动摩擦不完全理解。这是通过存在润滑而加剧,这导致了固体变形和流体耗散之间的多体耦合。缺乏了解阻碍了机器人研究的进步以及触觉材料和技术的摩擦可调性。在这里,我们提出了一种用于图案化表面的弹性流体动力学润滑(EHL)摩擦的通用缩放法。我们将Reynolds的等式和弹性结合起来考虑来自两个EHL限制的流体模式相互作用产生的剪切和正常力的贡献。通用缩放框架预测了50多个横梁的EHL摩擦系数,包括润滑滑动接触的图案化的弹性体,热固性件和水凝胶,与三种不同的仪器:平坦的跨越式跨越仪,生物悬浮的机器人指尖和人的手指。通过我们的模型的指尖数据的无参数 - 通过不同的模式几何形状,弹性和流体性能来调整软质纹理基板的EHL摩擦。 This framework provides new tools to inform the engineering of manufactured surfaces and materials, the design of robotic hands or grippers, and the engineering of haptic technologies for virtual reality.