
立即发布
北卡罗来纳州立大学的研究人员提出了一种热驱动器的新设计,可用于创建软机器人设备的快速运动。
“使用热驱动软机器人并不新鲜,但软热致动器的最大挑战是他们相对较慢,我们已经让他们快,”朱勇说,论文的通讯作者和安德鲁·a·亚当斯杰出的机械和航空航天工程教授数控状态。
执行器是一种设备的部件,比如一个软机器人,它通过将能量转化为功来产生运动。
该论文的第一作者、北卡罗来纳州立大学博士生吴爽说:“这种新型驱动器的工作原理是一种双稳定设计结构。”“想想一个短发夹。它是稳定的,直到你施加一定量的能量(通过弯曲它),然后它折断成不同的形状——这也是稳定的。”
在这种新型热致动器的情况下,材料是双稳态的,但材料倾向于哪种形状取决于温度。
这是它的工作原理。研究人员将两种材料叠加在一起,中间是银纳米线。这两种材料有不同的热膨胀系数,这意味着它们在加热时以不同的速率膨胀。实际上,这意味着当你加热时,结构会弯曲。
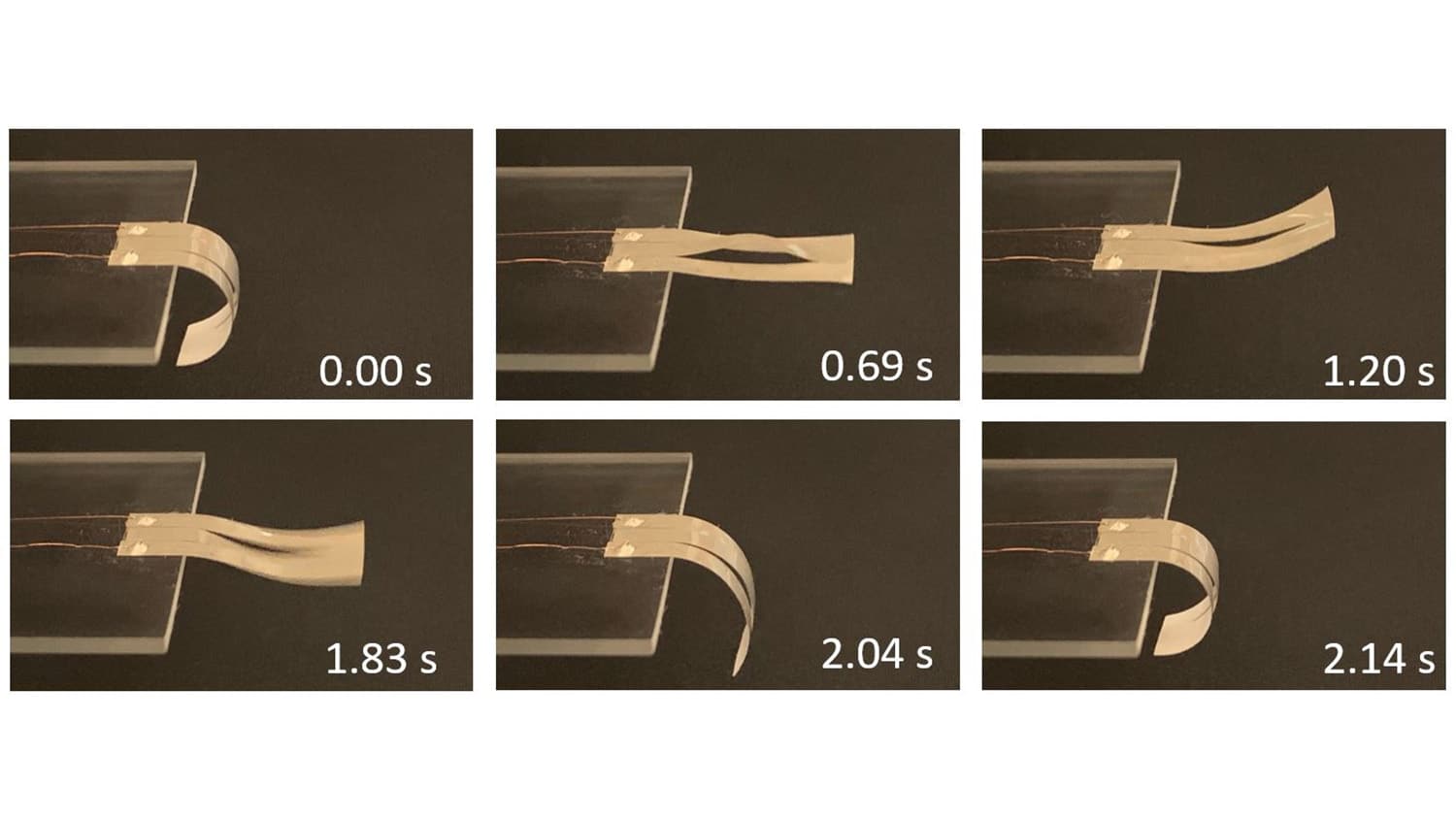
然后,这种分层材料被塑造成一个设计,赋予它一个方向上的默认曲率——让我们说它向下弯曲。当电压加到银纳米线上时,材料就会发热,使其向另一个方向弯曲。一旦你达到了一定的温度——临界温度——材料就会迅速弯曲成新的默认形状。当电压消失时,温度就会下降。一旦它冷却到另一个临界温度,材料就会迅速恢复到之前的默认形状,迅速弯曲下降。注意,这两个临界温度是不同的;第一个更高。通过在纳米线上施加有规律的电流,你可以让材料来回弹跳。
为了演示这项技术,研究人员创造了两个原型。其中一个原型模拟了捕蝇草的捕捉行为,而另一个原型则是一种“爬行动物”,能够每秒移动超过一个体长。
“潜在的应用范围从生物医学应用到假肢设备到高端制造,”朱说。“任何你想要快速移动,但又想避免刚性材料和传统机器人的应用。”
下一步包括开发传感器和控制机制,使驱动过程更加自动化,使其比纯手动控制更有效地运行。
“我们也有兴趣探索其他可能的材料,这样我们可以微调热和机械性能,”朱说。“这可以让我们定制驱动器的速度和力量。”
纸”,软机器人快速热致动器发表在该杂志上柔软的机器人。这篇论文的作者之一是北卡罗来纳州立大学(NC State)的前研究生兰斯顿·贝克(Langston Baker);以及北卡州立大学机械与航空航天工程副教授尹杰。这项工作得到了美国国家科学基金会的支持,资助编号为1637892。
希普曼-
编辑:研究摘要如下。
软机器人用快速热致动器
作者:吴爽,G. Langston Baker,殷杰,朱勇,北卡罗来纳州立大学
发表: 12月7日,柔软的机器人
DOI: 10.1089 / soro.2021.0080
文摘:热驱动是一种常用的软机器人驱动方法。然而,一个主要的限制是相对较慢的驱动速度。在这里,我们报告了显着提高双晶型热致动器的驱动速度,通过利用snap-through不稳定性。该驱动器由银纳米线/聚二甲基硅氧烷复合材料制成。通过snap-through不稳定性是通过简单地应用偏移位移到执行器结构的一部分。采用实验和有限元分析相结合的方法,研究了复合材料导热系数、偏心位移和驱动频率对驱动器速度的影响。驱动器的弯曲速度高达28.7 cm-1/s,是不带直通不稳定性的10倍。以一种速度为1.04体长/秒的快速爬行机器人和一种仿金星捕蝇器为例,说明了快速双晶型热致动器在软机器人领域的应用前景。


